
For procedures, see your mechanical laboratory manual.
Title: The Conical Pendulum
Aim
- To investigate the variation in height of a conical pendulum with a change of speed.
- To determine the acceleration due to gravity 'g'.
Theory

A conical pendulum consists of a bob of mass 'm' revolving in a horizontal circle with constant speed 'v' at the end of a string of length 'l'. Its construction is similar to an ordinary pendulum; however, instead of swinging back and forth, the bob of a conical pendulum moves at a constant speed in a circle with the string (or rod) tracing out a cone. The conical pendulum was first studied by the English scientist Robert Hooke around 1660 as a model for the orbital motion of planets.
During the 1800s, conical pendulums were used as the timekeeping element in a few clockwork timing mechanisms where a smooth motion was required, as opposed to the unavoidably jerky motion provided by ordinary pendulums. Two examples were mechanisms to turn the lenses of lighthouses to sweep their beams across the sea, and the location drives of equatorial mount telescopes, to allow the telescope to follow a star smoothly across the sky as the Earth turns.
One of the most important uses of the conical pendulum was in the flyball governor (centrifugal governor) invented by James Watt in 1788 which regulated the speed of steam engines during the Steam Age in the 1800s. The playground game tetherball uses a ball attached to a pole by a cord which functions as a conical pendulum, although the pendulum gets shorter as the cord wraps around the pole. Some amusement park rides act as conical pendulums.
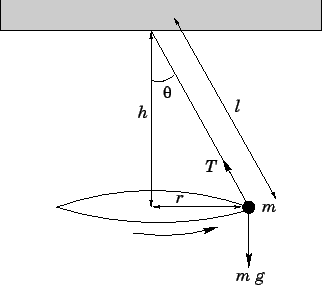
In this case, the string makes a constant angle with the vertical. The bob of the pendulum describes a horizontal circle and the string describes a cone.
The object is subject to two forces: the gravitational force mg which acts vertically downwards, and the tension force T which acts upwards along the string. The tension force can be resolved into a component Tcosθ which acts vertically upwards, and a component Tsinθ which acts towards the center of the circle. Force balance in the vertical direction yields Tcosθ = mg.
In other words, the vertical component of the tension force balances the weight of the object.
Since the object is executing a circular orbit, radius r with angular velocity ω it experiences a centripetal acceleration ωr². Hence, it is subject to a centripetal force mωr². This force is provided by the component of the string tension which acts towards the center of the circle. In other words, Tsinθ = mg.
Taking the ratio of both equations, we obtain
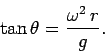

Hence, we find

References
- The conical pendulum, University of Texas.
- Conical pendulum, wikipedia.org.
- Conical pendulum, thefactor.com.
- Moment of Inertia, wikipedia.org.
- Nauenberg, Michael (2006). "Robert Hooke's seminal contribution to orbital dynamics". Robert Hooke: Tercentennial Studies. Ashgate Publishing. pp 17-19.
{kind=link}
0 Comments